Flying Fast through Places Never Seen Before
Planning, control, and learned policies that let aerial robots move at speed through cluttered environments they have no map of.
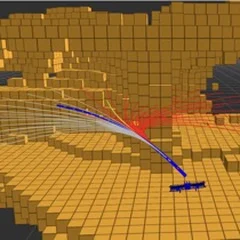
This research asks how fast a quadrotor can safely fly through a space it is seeing for the first time — using only onboard depth cameras, IMUs, and learned or reactive decision-making.
Flying fast in an unknown place forces every part of the autonomy stack to keep up: perception must digest depth observations in milliseconds, planners must commit to motion before the map is complete, and control must stay safe at the edge of the vehicle’s dynamics. Our papers span this whole spectrum — safe semiautonomous teleoperation with hierarchical collision checking, reactive planners driven directly by depth-camera observations, and end-to-end reinforcement learning policies that exploit simulator-privileged information. Most recently, we developed microsecond ellipsoid-GMM distance metrics that make continuous-space collision checking fast enough for high-speed flight.
Work in this area