Distance and Collision Probability Estimation from Gaussian Surface Models
IROS · 2025
Can we enable collision avoidance from surfaces when the surfaces are incrementally revealed to the robot through a depth sensor and compressed into a set of Gaussians?
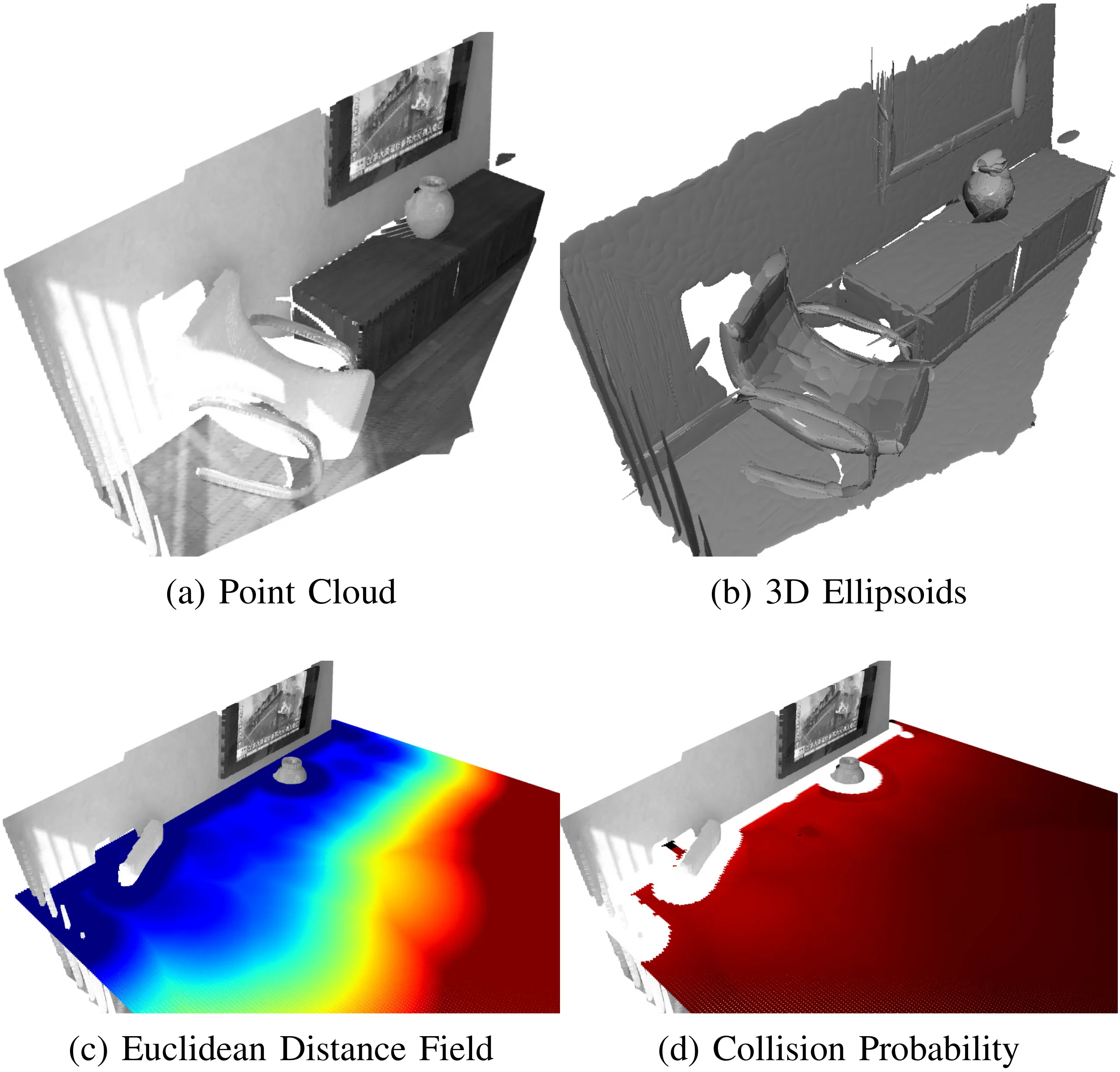
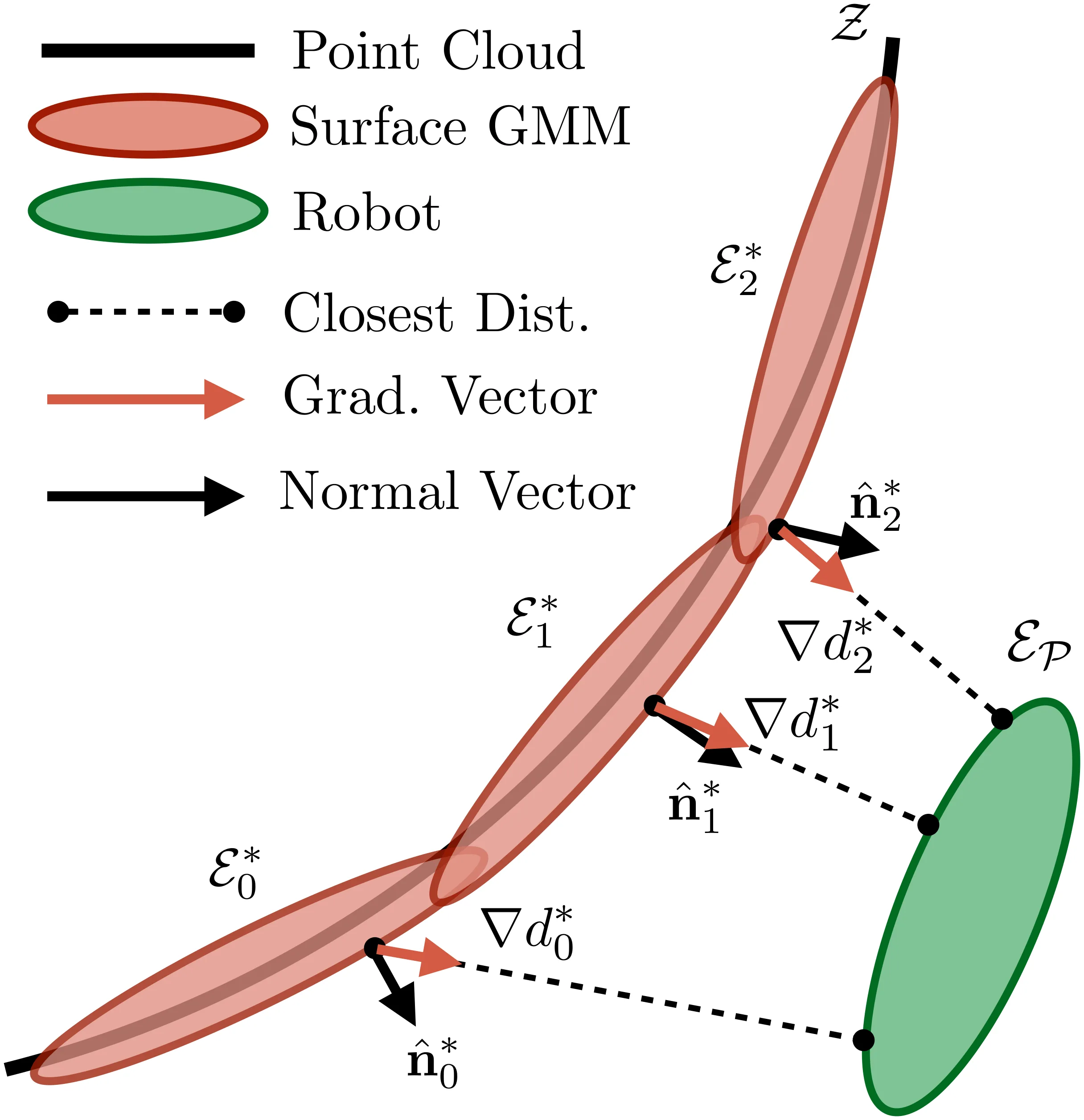
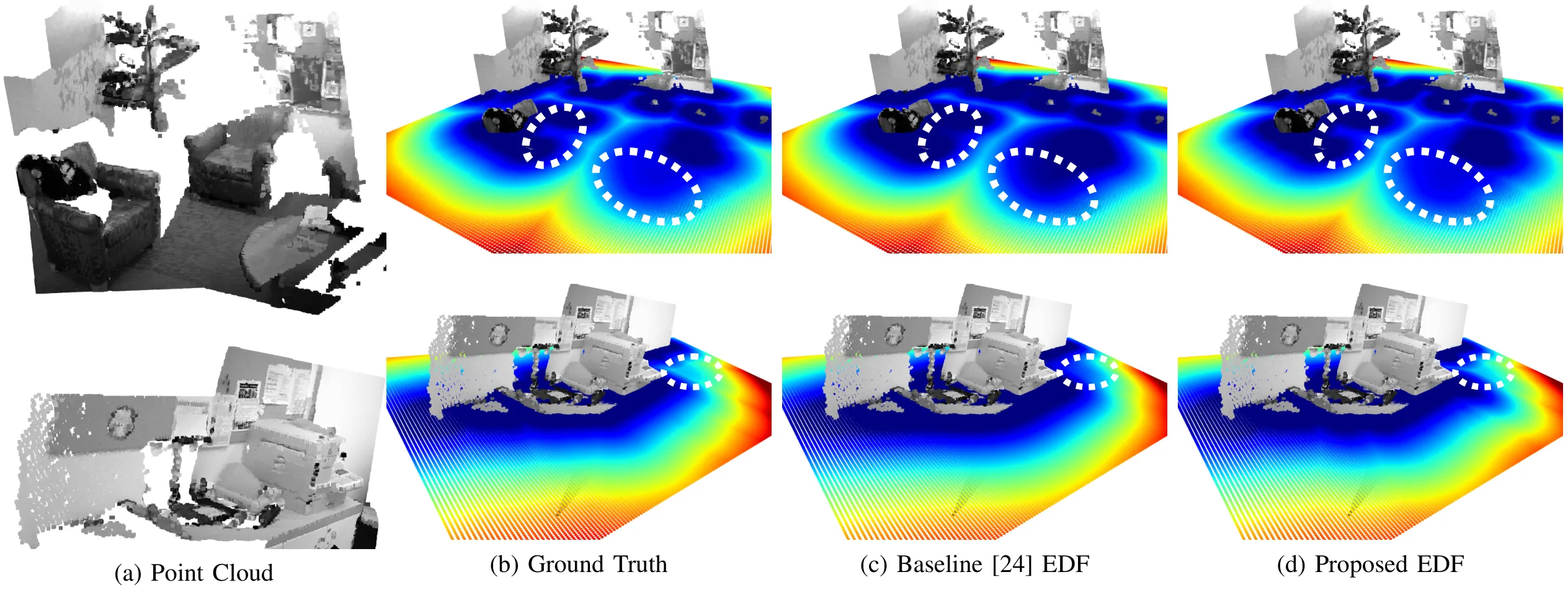
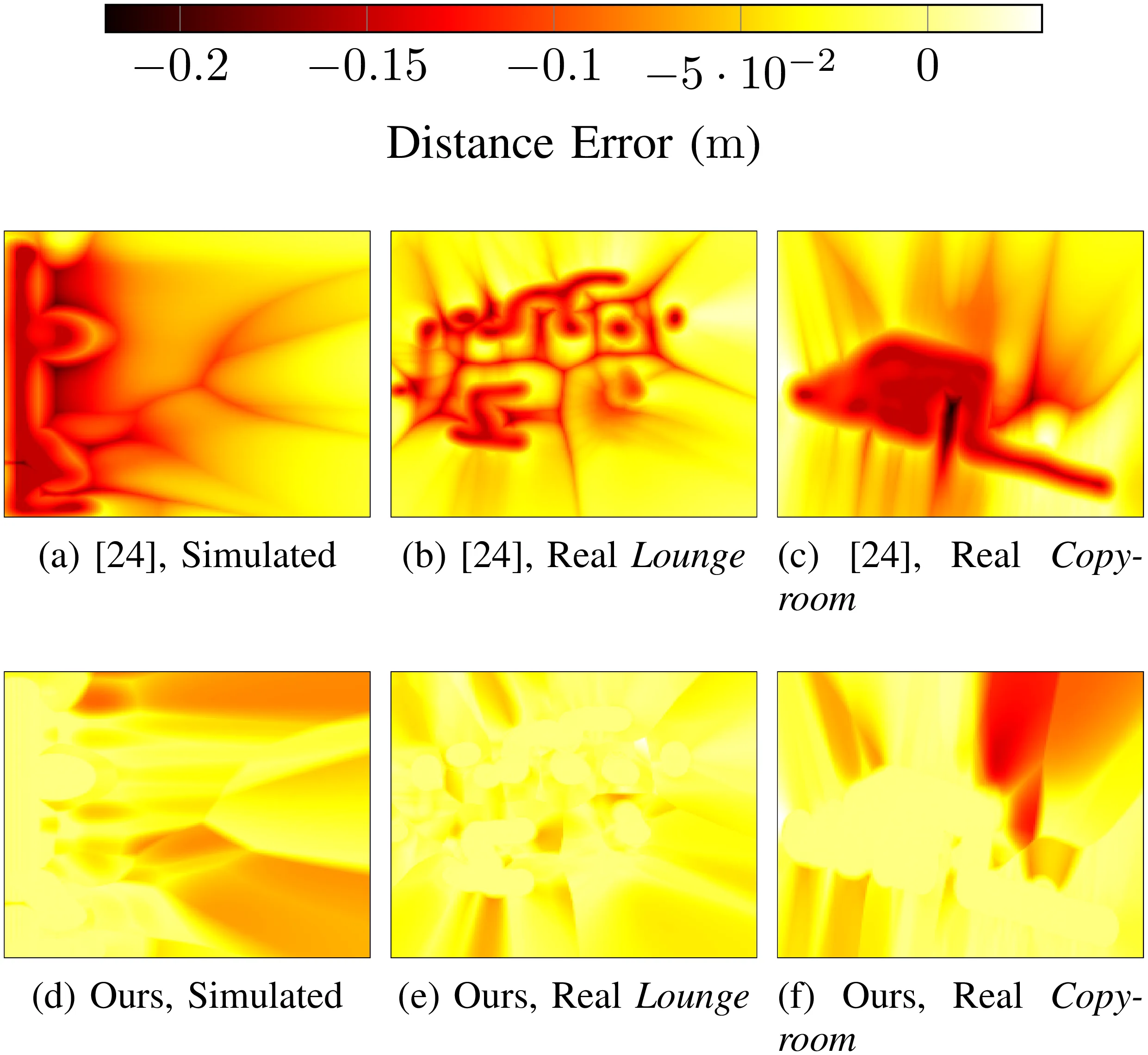
This paper describes methodologies to estimate the collision probability, Euclidean distance and gradient between a robot and a surface, without explicitly constructing a free space representation. The robot is assumed to be an ellipsoid as opposed to the commonly used spherical model, thus providing a tighter approximation for navigation in cluttered and narrow spaces. Instead of computing distances over raw point clouds or large high-resolution occupancy grids, the environment is modeled using Gaussian mixture models and approximated via a set of ellipsoids. A parallelizable strategy to accelerate an existing ellipsoid-ellipsoid distance computation method is presented. Evaluation in 3D environments demonstrates improved performance over a state-of-the-art Gaussian Process-based method. Execution times for the approach are within a few microseconds per ellipsoid pair using a single-thread on low-power embedded computers.
Figures
Acknowledgments
This work was supported in part by an Uber Presidential Fellowship. This material is based upon work supported by, or in part by, the Army Research Laboratory and the Army Research Office under contract/grant number W911NF-25-2-0153. The authors thank J. Lee, M. Hansen, and D. Wettergreen for feedback on this manuscript.
BibTeX
@inproceedings{goel2025distance,
title={Distance and Collision Probability Estimation from Gaussian Surface Models},
author={Goel, Kshitij and Tabib, Wennie},
journal={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2025}
}