Safe & Agile Aerial Navigation
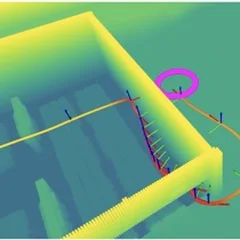
Safe, agile flight through unstructured environments using depth cameras, IMUs, and learning.
This research studies planning, control, and neural network policies that allow quadrotors to fly fast and avoid obstacles in unknown spaces.
Our papers span safe semiautonomous teleoperation using hierarchical collision checking, reactive planners using depth camera observations, and end-to-end reinforcement learning methods that leverage simulator-privileged information. Most recently, we develop microsecond ellipsoid-GMM distance metrics to allow continuous-space collision checking.
Related publications
Work in this area