High-Fidelity Perception & Mapping
Compact generative models for inference, registration, reconstruction, and occupancy mapping.
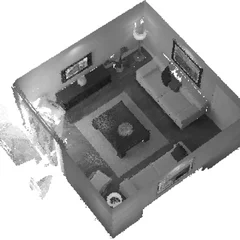
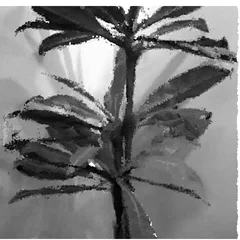
We design algorithms to compress dense sensor feeds (like 3D point clouds) into low-memory, mathematically tractable Gaussian Mixture Models.
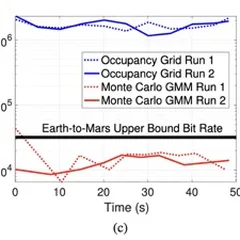
Instead of building multiple disparate pipelines for reconstruction, pose estimation, and occupancy grid modeling, we unify them using GMMs. By modeling physical space with continuous probability distributions, we enable size-weight-and-power (SWaP) constrained systems to map environments at high fidelity and communicate models over low-bandwidth links.
Related publications
Work in this area