Incremental Multimodal Surface Mapping via Self-Organizing Gaussian Mixture Models
RAL · 2023
As multimodal point clouds are accrued from dense 3D sensors, how do we incrementally compress these point clouds into a Gaussian Mixture Model (GMM)?
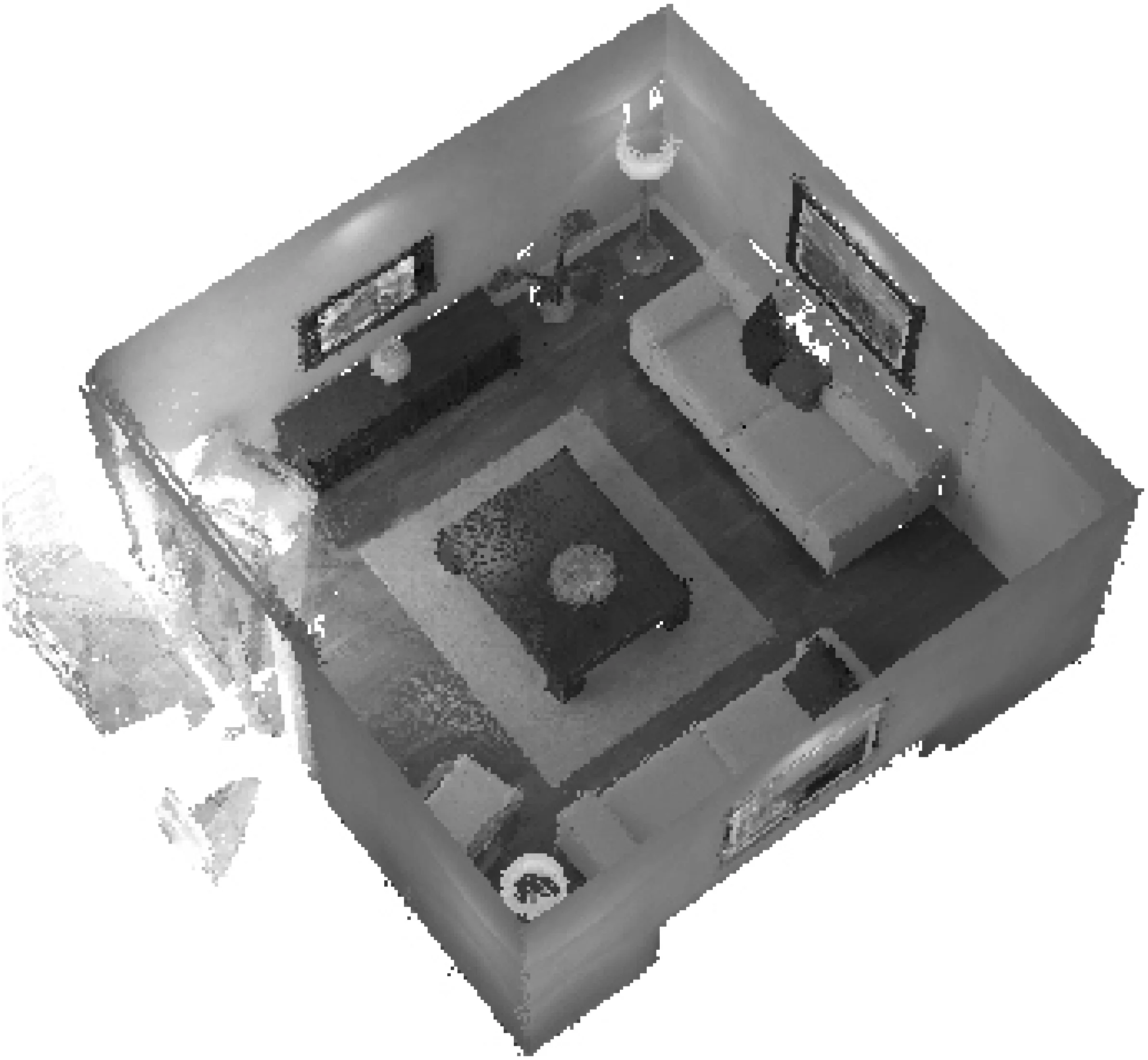
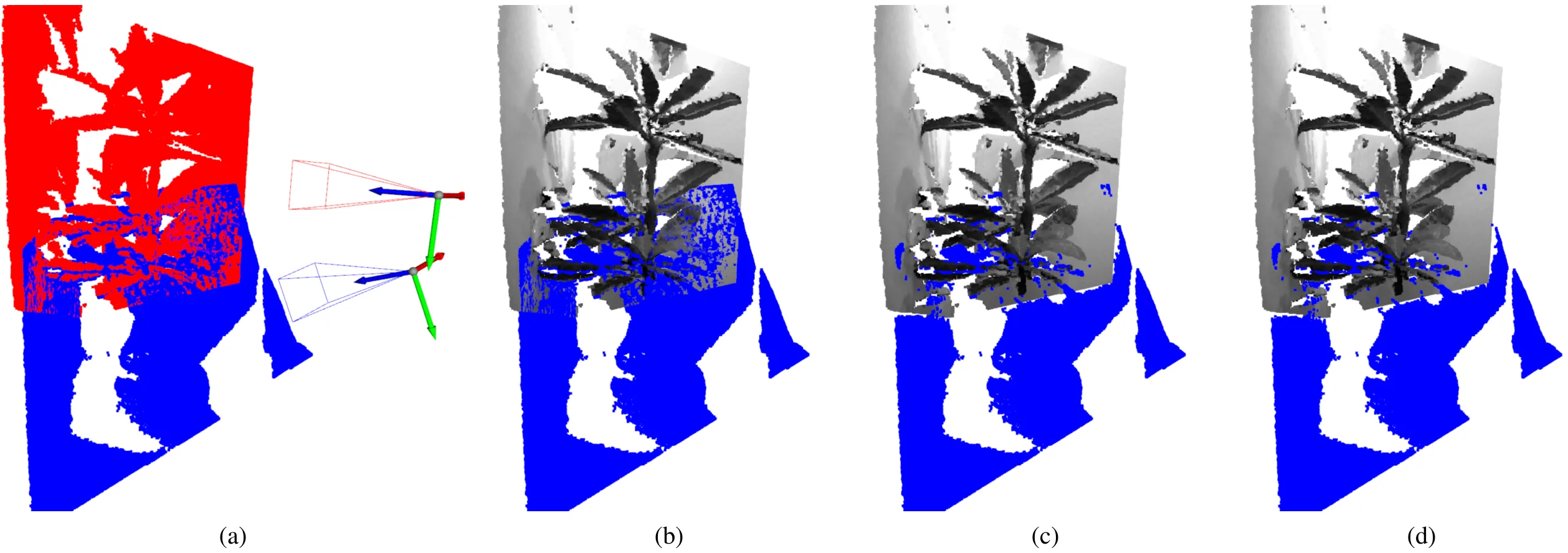
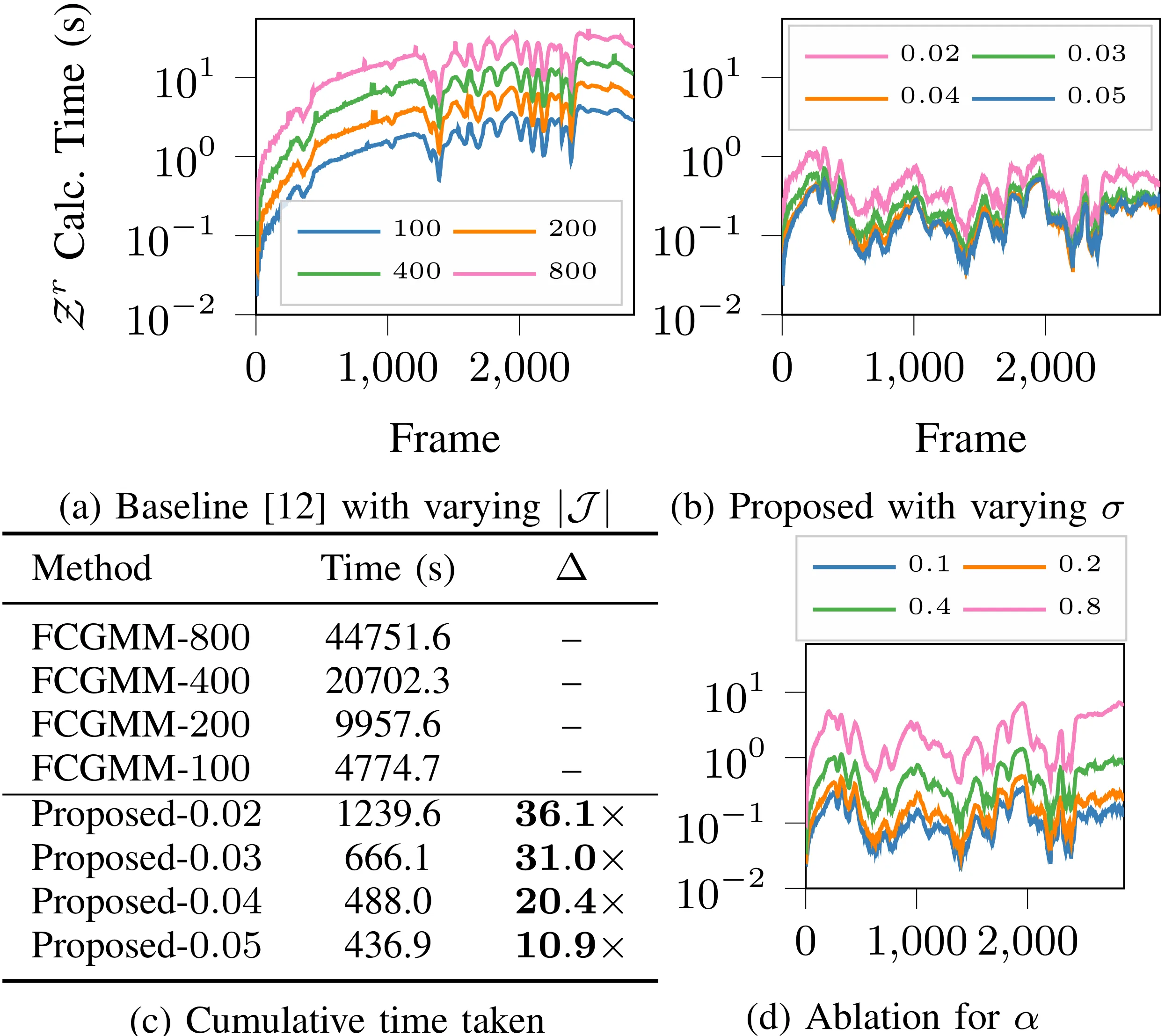
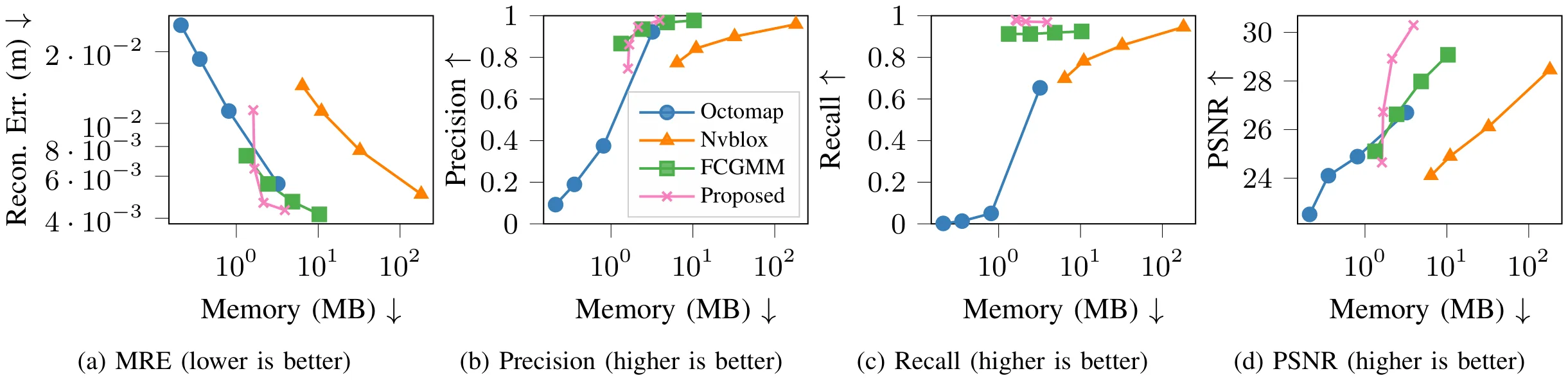
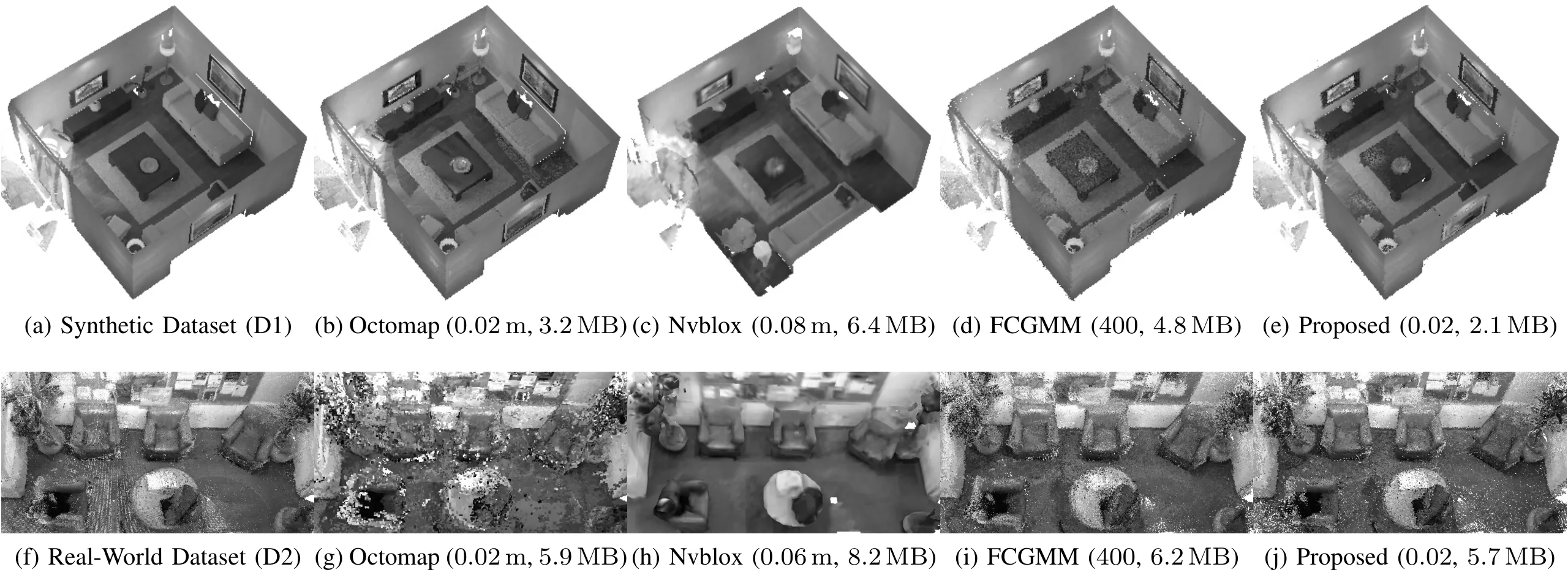
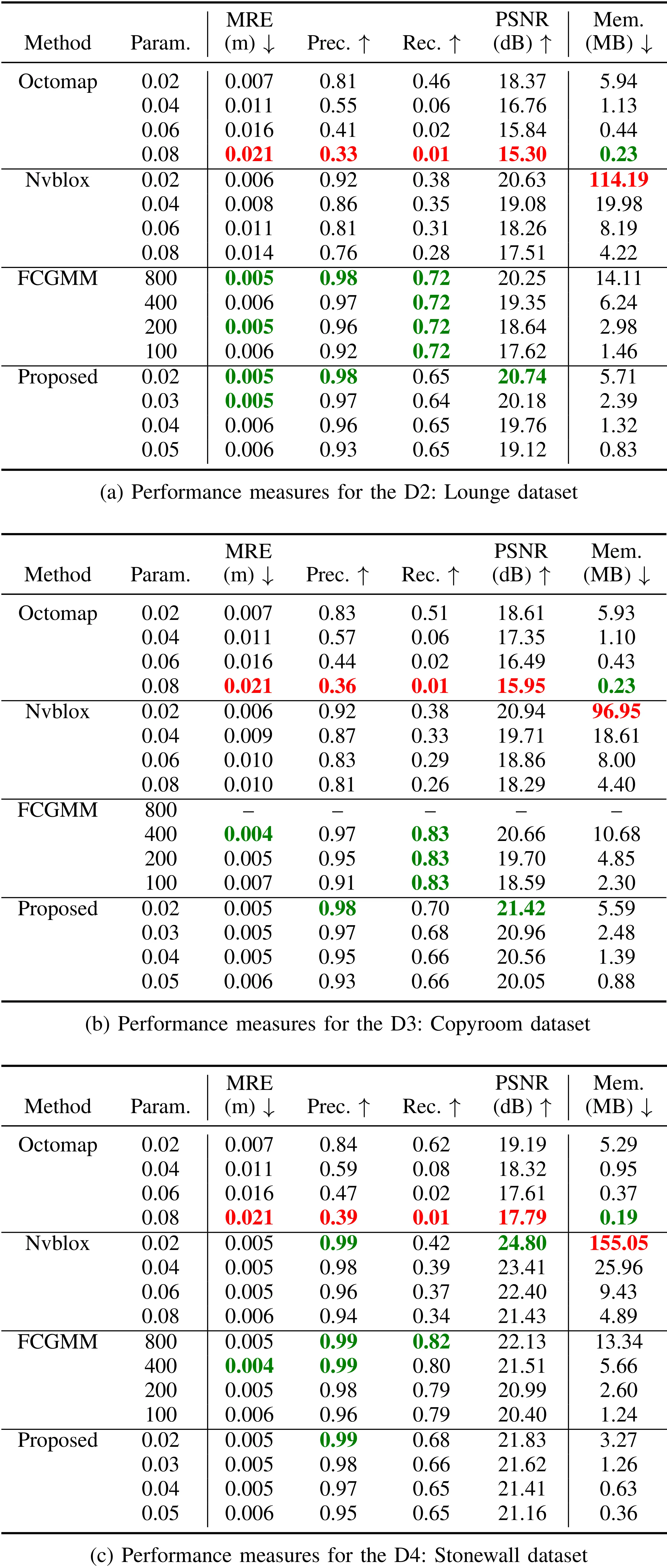
This letter describes an incremental multimodal surface mapping methodology, which represents the environment as a continuous probabilistic model. This model enables high-resolution reconstruction while simultaneously compressing spatial and intensity point cloud data. The strategy employed in this work utilizes Gaussian mixture models (GMMs) to represent the environment. While prior GMM-based mapping works have developed methodologies to determine the number of mixture components using information-theoretic techniques, these approaches either operate on individual sensor observations, making them unsuitable for incremental mapping, or are not real-time viable, especially for applications where high-fidelity modeling is required. To bridge this gap, this letter introduces a spatial hash map for rapid GMM submap extraction combined with an approach to determine relevant and redundant data in a point cloud. These contributions increase computational speed by an order of magnitude compared to state-of-the-art incremental GMM-based mapping. In addition, the proposed approach yields a superior tradeoff in map accuracy and size when compared to state-of-the-art mapping methodologies (both GMM- and not GMM-based). Evaluations are conducted using both simulated and real-world data. The software is released open-source to benefit the robotics community.
Figures

BibTeX
@article{goel2023incremental,
title={Incremental multimodal surface mapping via self-organizing gaussian mixture models},
author={Goel, Kshitij and Tabib, Wennie},
journal={IEEE Robotics and Automation Letters},
volume={8},
number={12},
pages={8358--8365},
year={2023},
publisher={IEEE}
}