Real-Time Information-Theoretic Exploration with Gaussian Mixture Model Maps
RSS · 2019
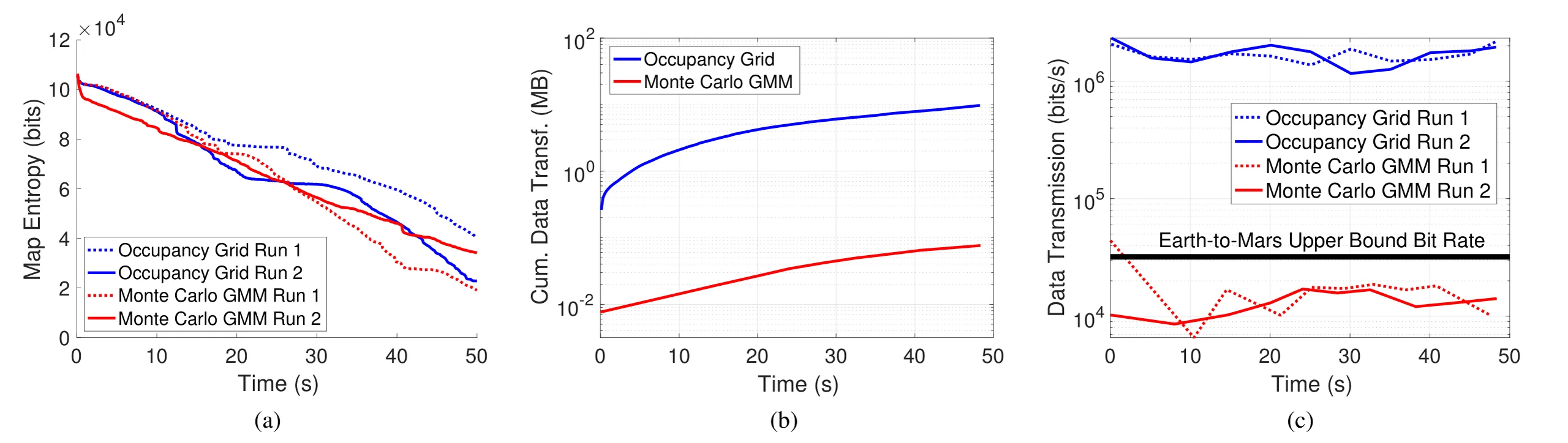
How to compress LiDAR point clouds into a representation that can enable exploration of 3D spaces?
This paper addresses the following problem: How to compress LiDAR point clouds into a representation that can enable exploration of 3D spaces? To solve this, we propose: This paper develops an exploration framework that leverages Gaussian mixture models (GMMs) for high-fidelity perceptual modeling and exploits the compactness of the distributions for information sharing in communications-constrained applications.
Figures

Acknowledgments
This work was supported in part by NASA STTR Grant NNX16CK16C and industry. The authors thank Xuning Yang for fruitful discussions about motion primitives-based planning and Aditya Dhawale for feedback on this manuscript.
BibTeX
@inproceedings{real-time-gmm-exploration-2019,
title={Real-Time Information-Theoretic Exploration with Gaussian Mixture Model Maps},
author={Wennie Tabib, Kshitij Goel, John Yao, Mosam Dabhi, Curtis Boirum, and Nathan Michael},
booktitle={Robotics: Science and Systems (RSS), 2019},
year={2019}
}