Continuous World Models for Perception and Planning
Modeling the world as continuous probability distributions instead of discrete grids — one compact representation for inference, registration, reconstruction, and occupancy.
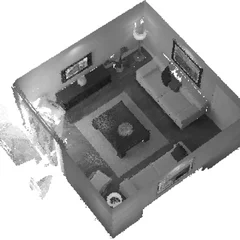
We design algorithms that compress dense sensor feeds (like 3D point clouds) into continuous, generative world models — low-memory Gaussian Mixture Models that both perception and planning can query directly.
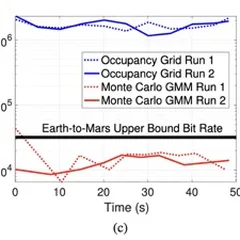
Robots typically fragment their understanding of the world across disparate pipelines: one map for reconstruction, another for pose estimation, a third for occupancy. We replace them with a single continuous world model. By representing physical space as probability distributions rather than voxels, Gaussian Mixture Models unify reconstruction, registration, and occupancy inference in one compact form — and expose analytical structure that planners can exploit, from microsecond distance queries to collision-probability gradients. The same compactness lets size-weight-and-power constrained systems map at high fidelity and share their models over low-bandwidth links.
Work in this area