Decentralized Uncertainty-Aware Active Search with a Team of Aerial Robots
ISER · 2025
How do we leverage a team of aerial robots to search for an unknown number of objects of interest (OOI) in a communications-denied environment?
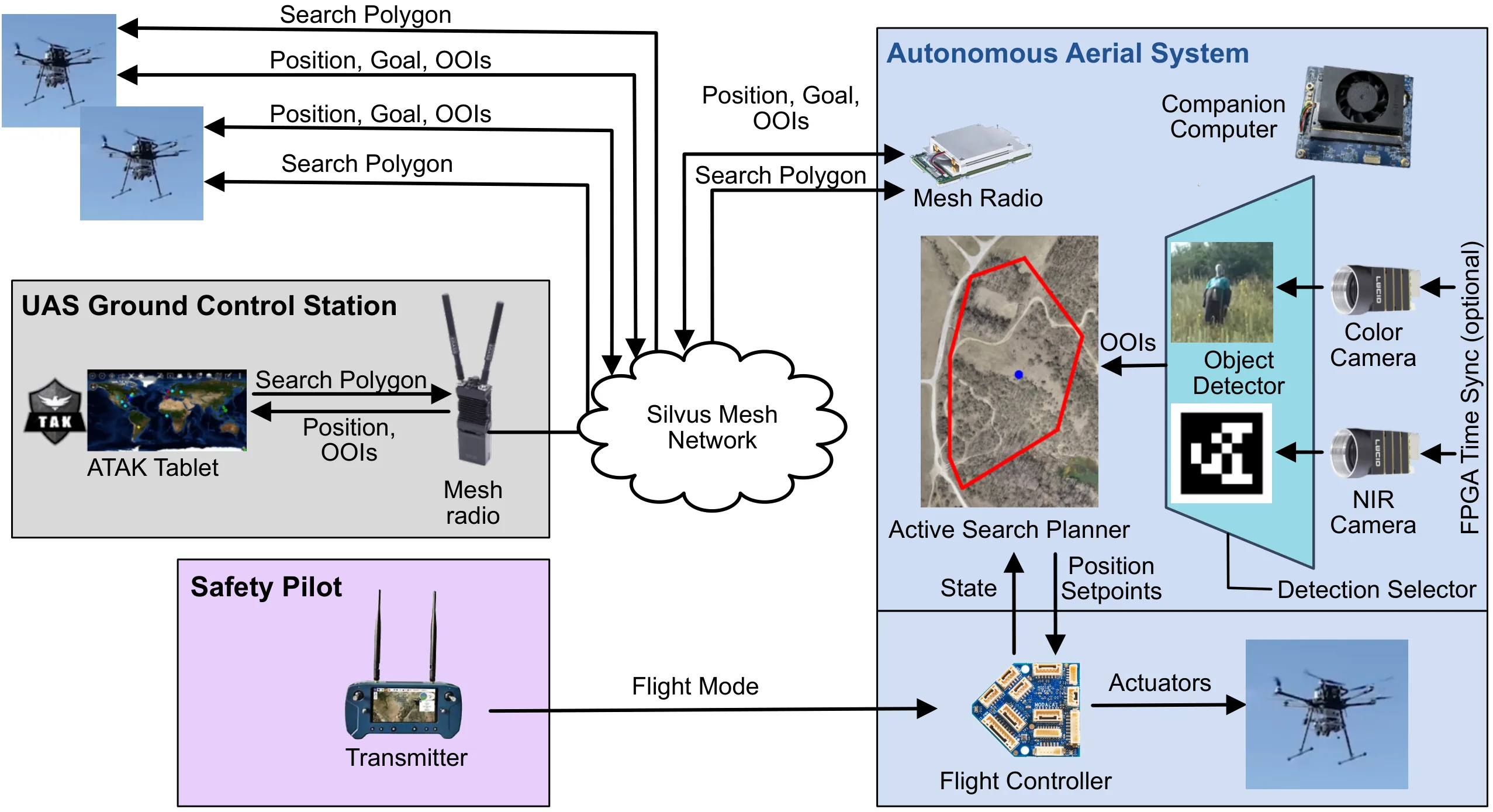
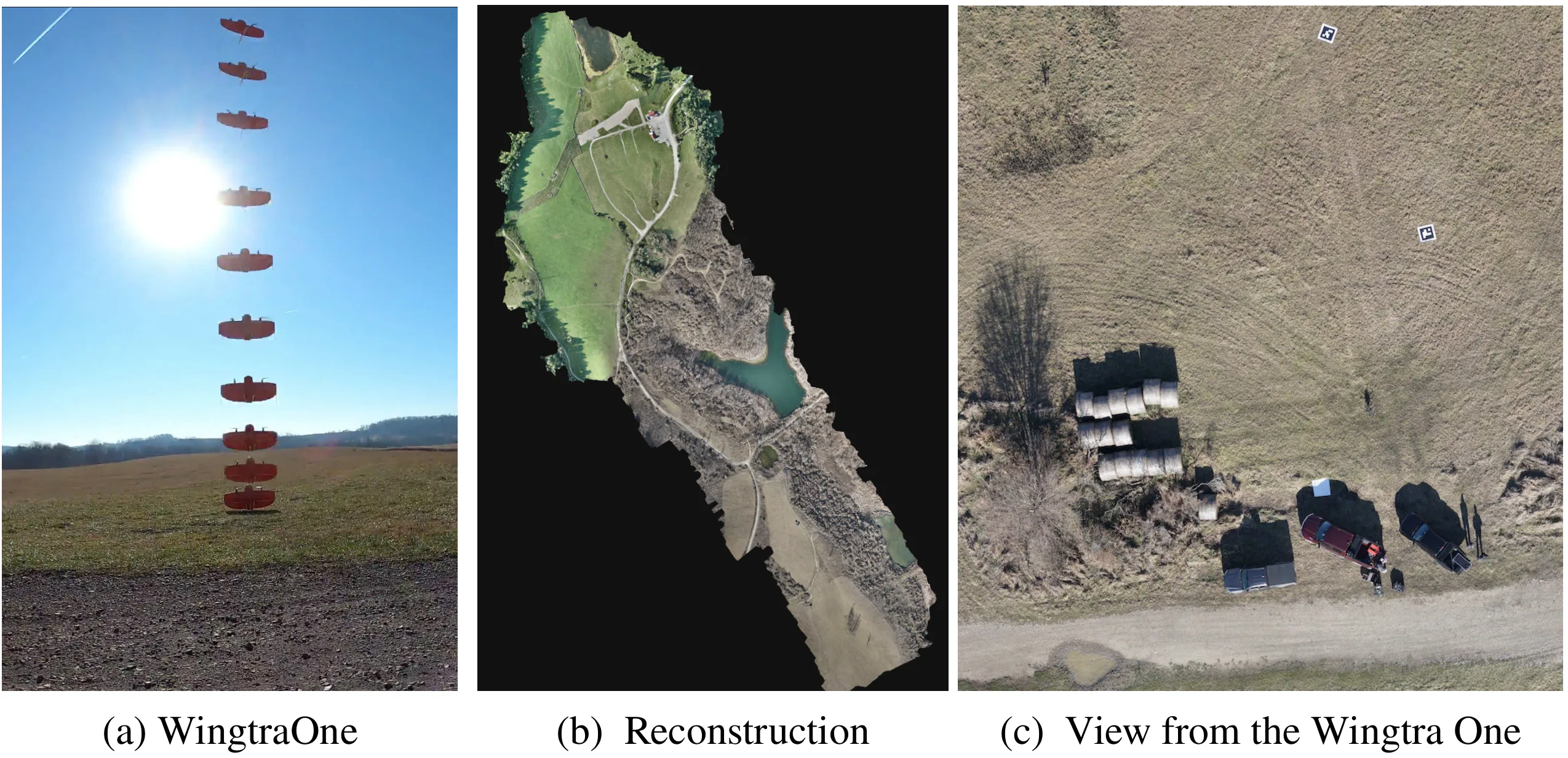
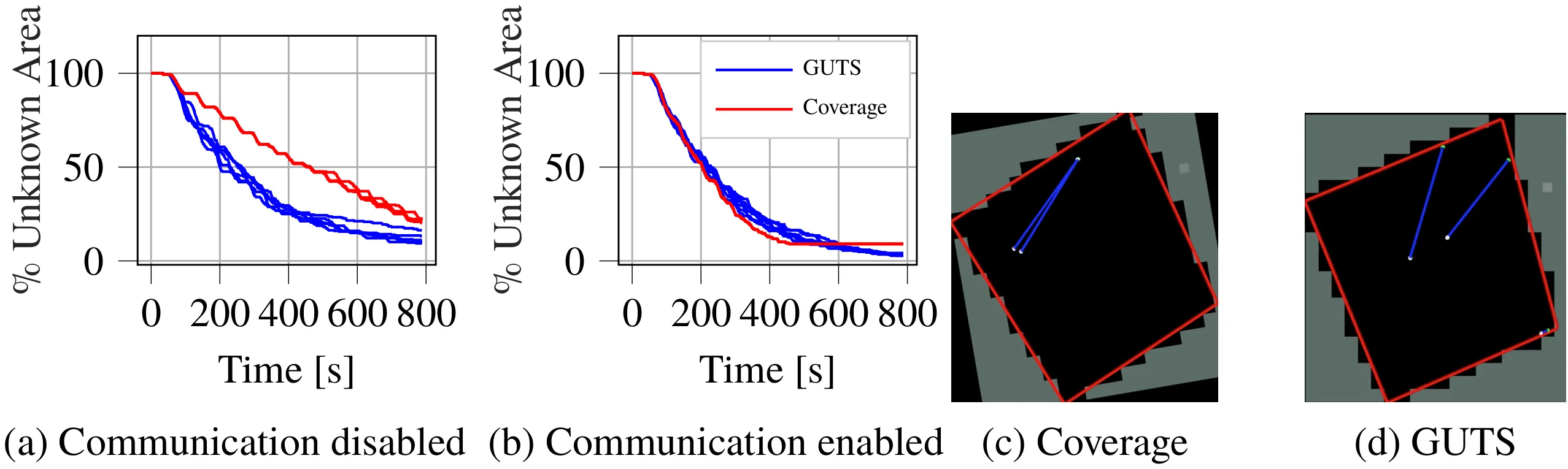
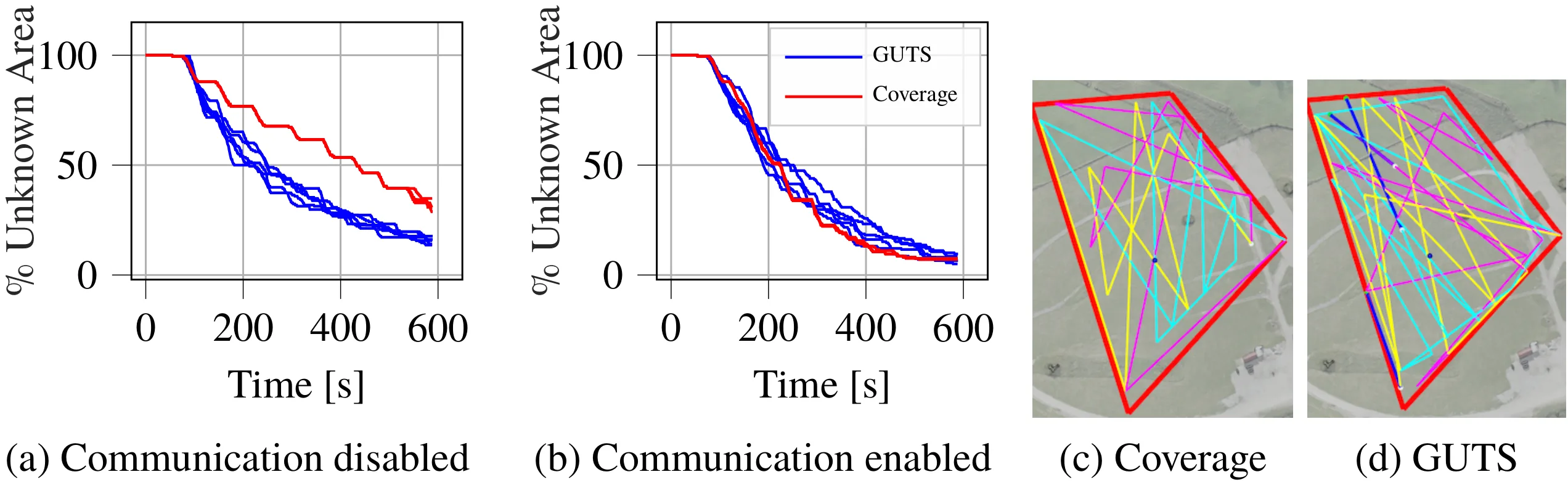
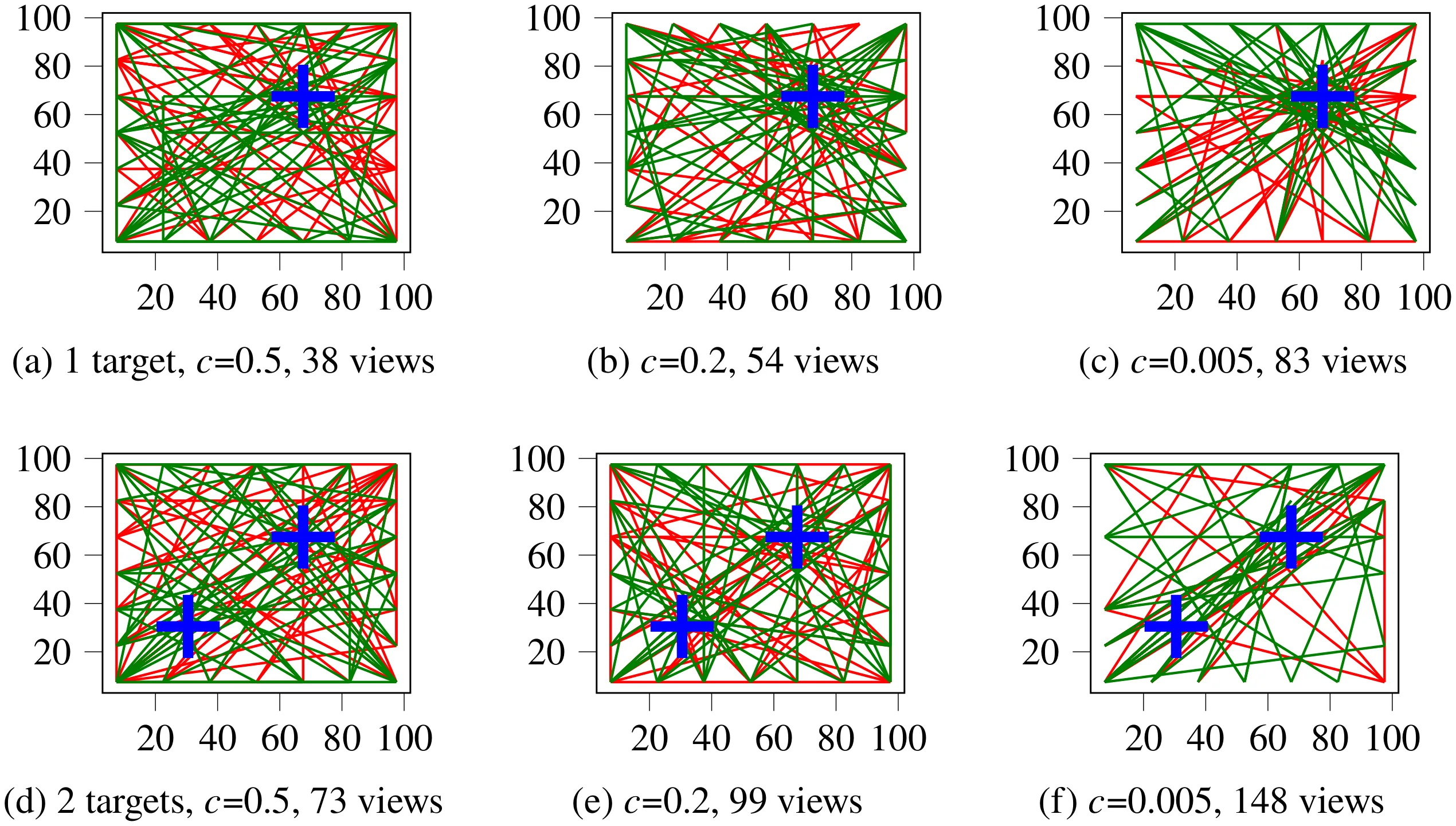
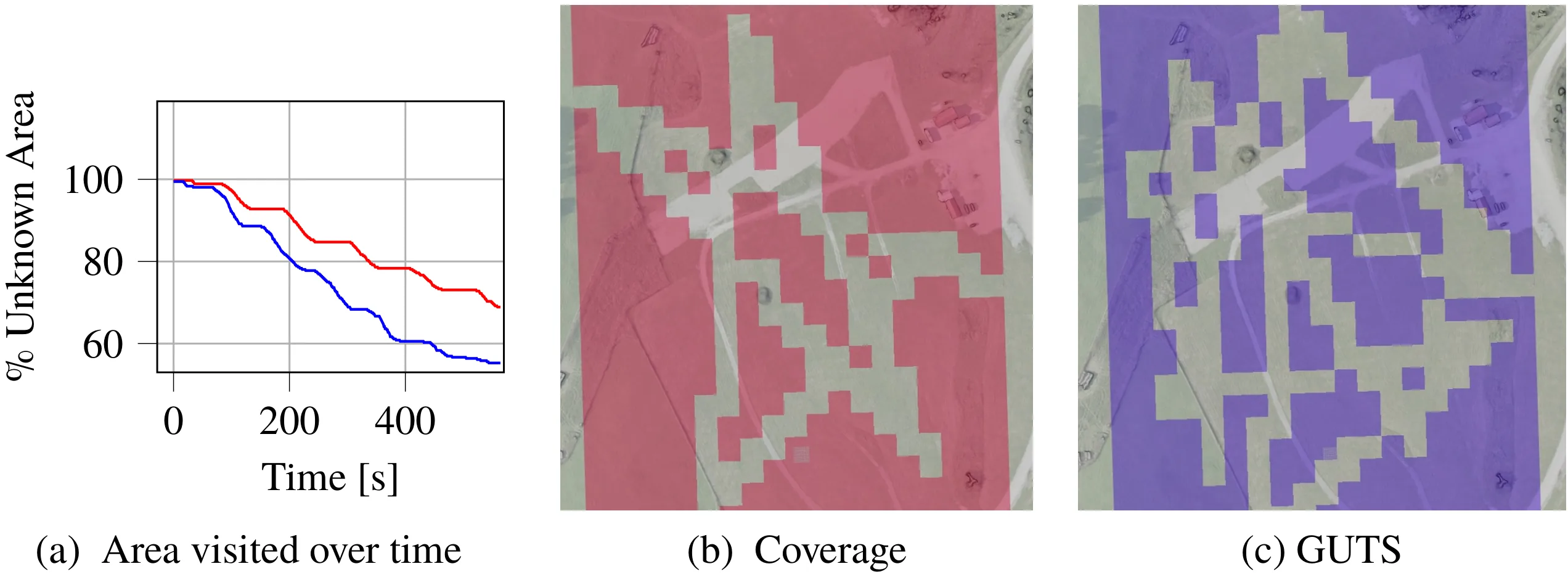
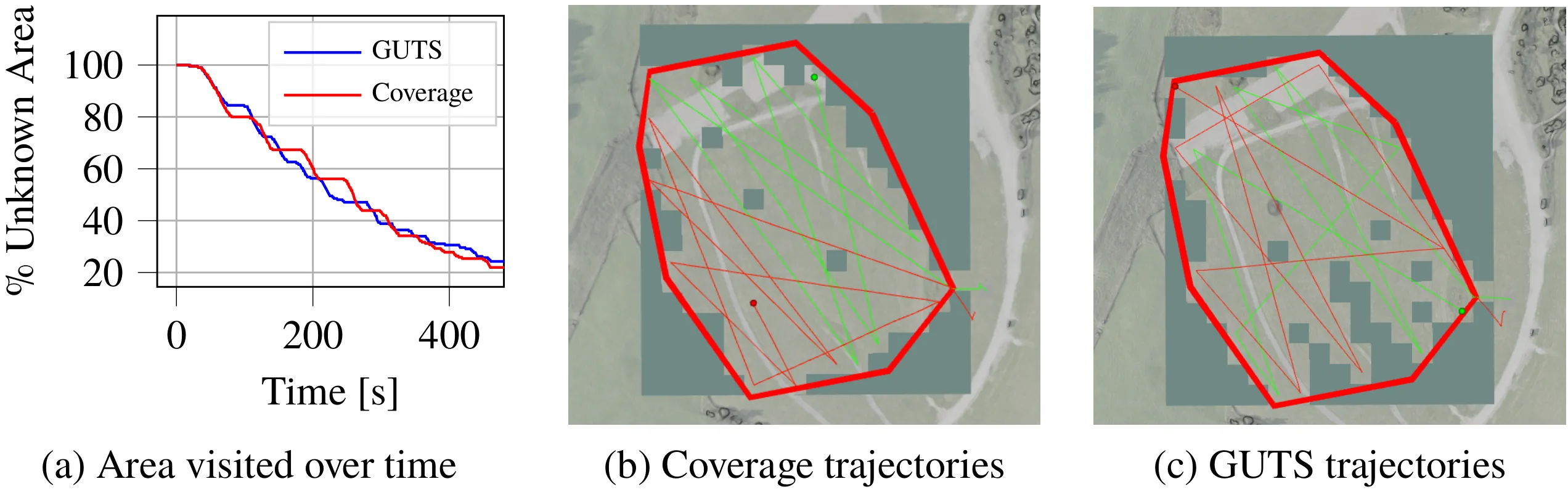
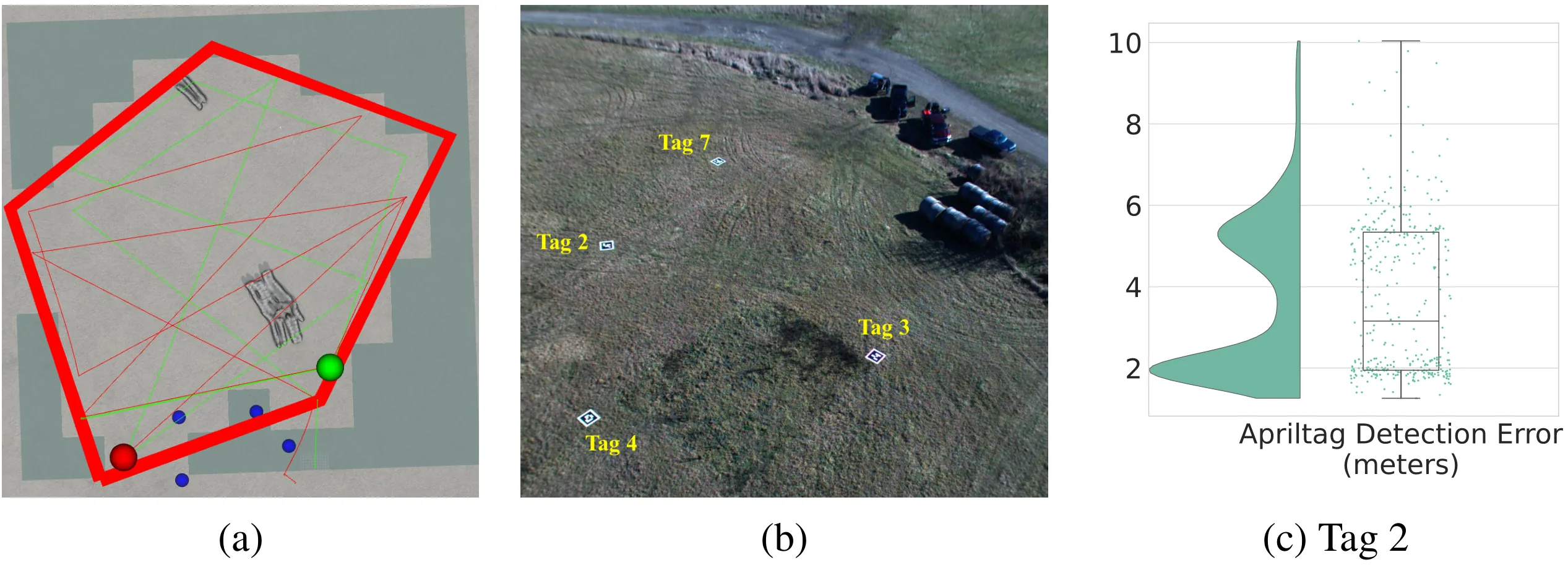
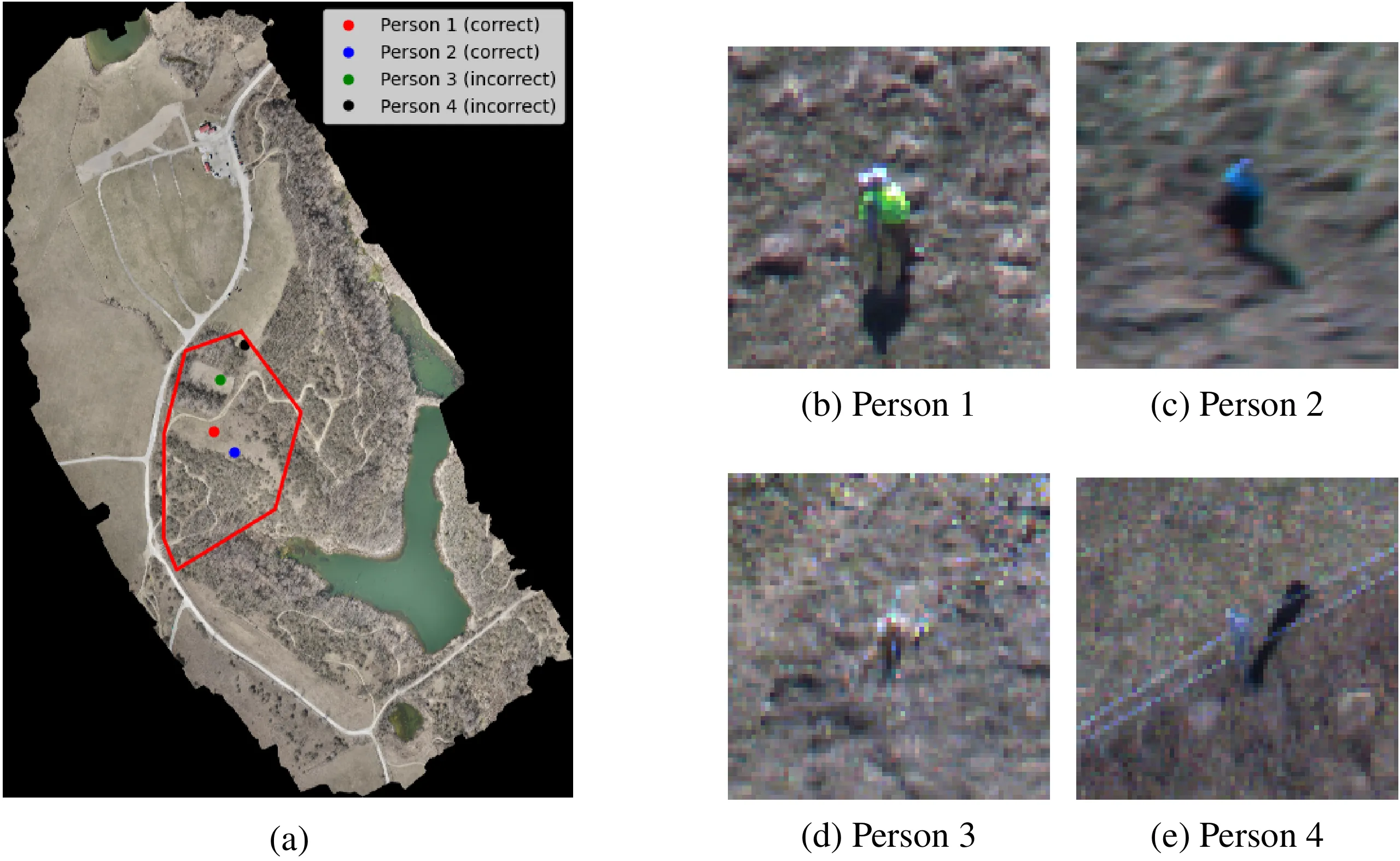
Rapid search and rescue is critical to maximizing survival rates following natural disasters. However, these efforts are challenged by the need to search large disaster zones, lack of reliability in the communications infrastructure, and a priori unknown numbers of objects of interest (OOIs), such as injured survivors. Aerial robots are increasingly being deployed for search and rescue due to their high mobility, but there remains a gap in deploying multi-robot autonomous aerial systems for methodical search of large environments. Prior works have relied on preprogrammed paths from human operators or are evaluated only in simulation. We bridge these gaps in the state of the art by developing and demonstrating a decentralized active search system, which biases its trajectories to take additional views of uncertain OOIs. The methodology leverages stochasticity for rapid coverage in communication denied scenarios. When communications are available, robots share poses, goals, and OOI information to accelerate the rate of search. Detections from multiple images and vehicles are fused to provide a mean and covariance for each OOI location. Extensive simulations and hardware experiments in Bloomingdale, OH, are conducted to validate the approach. The results demonstrate the active search approach outperforms greedy coverage-based planning in communication-denied scenarios while maintaining comparable performance in communication-enabled scenarios. The results also demonstrate the ability to detect and localize all a priori unknown OOIs with a mean error of approximately 3m at flight altitudes between 50m-60m.
Figures

Acknowledgments
This work was supported in part by the U.S. Army Research Office and the U.S. Army Futures Command under Contract No. W519TC-23-C-0031.
BibTeX
@inproceedings{decentralized-active-search-2025,
title={Decentralized Uncertainty-Aware Active Search with a Team of Aerial Robots},
author={Wennie Tabib, John Stecklein, Caleb McDowell, Kshitij Goel, Felix Jonathan, Abhishek Rathod, Meghan Kokoski, Edsel Burkholder, Brian Wallace, Luis Ernesto-Navarro-Serment, Nikhil Angad Bakshi, Tejus Gupta, Norman Papernick, David Guttendorf, Erik E. Kahn, Jessica Kasemer, Jesse Holdaway, and Jeff Schneider},
booktitle={International Symposium on Experimental Robotics (ISER), 2025},
year={2025}
}