Communication-Efficient Planning and Mapping for Multi-Robot Exploration in Large Environments
RAL · 2019
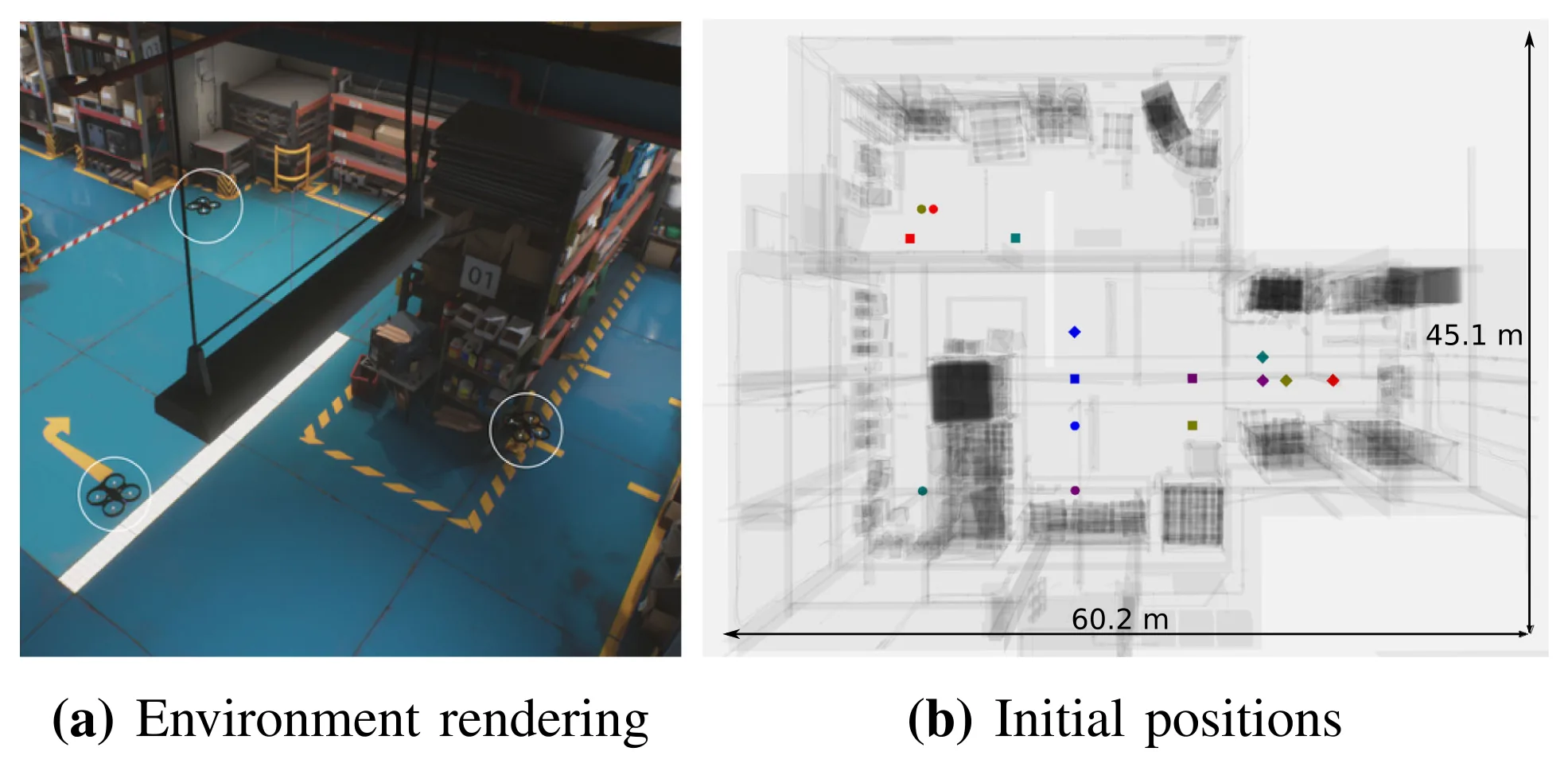
How to efficiently communicate relevant information between robots as the robots explore a large 3D environment?
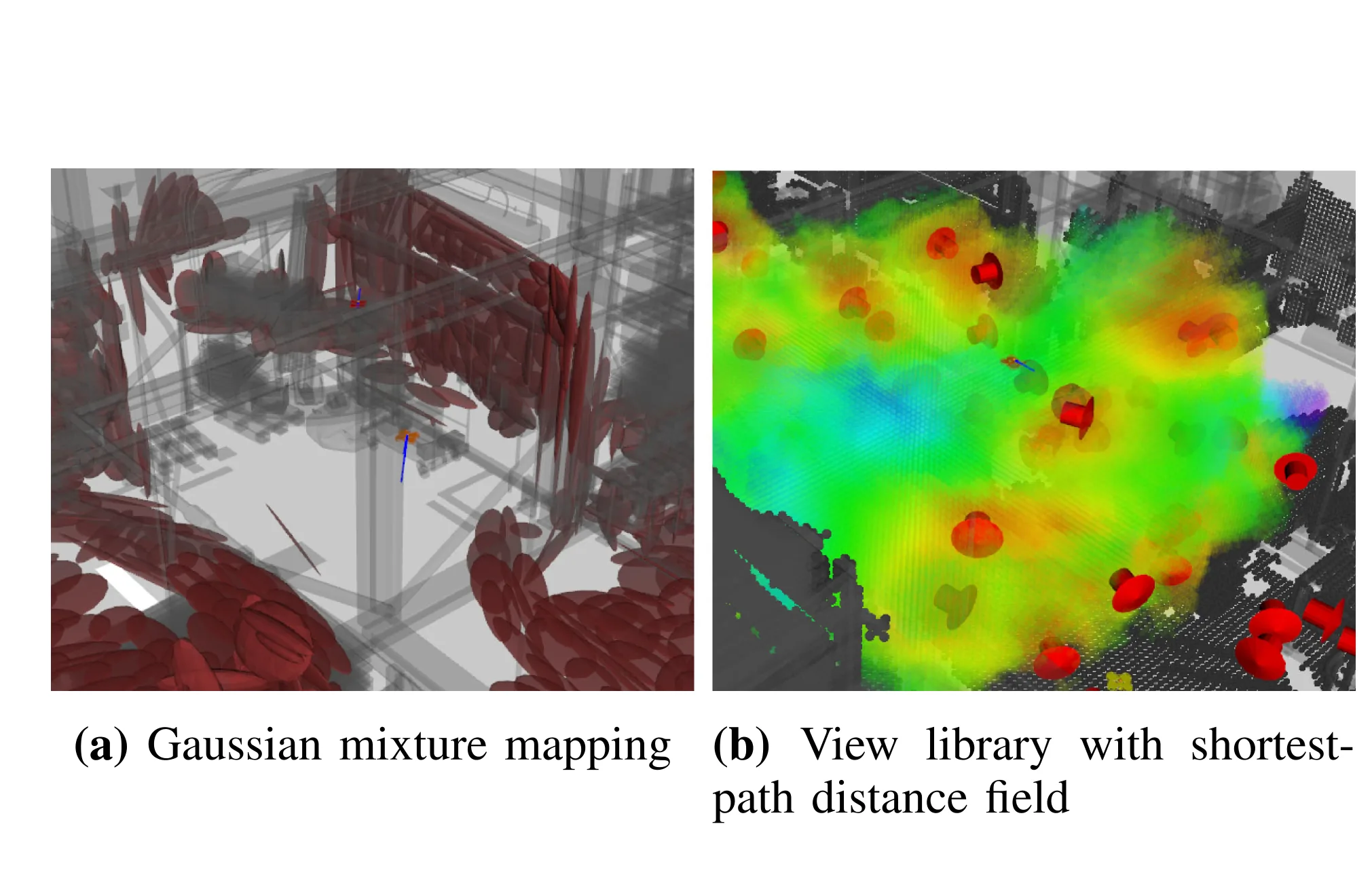
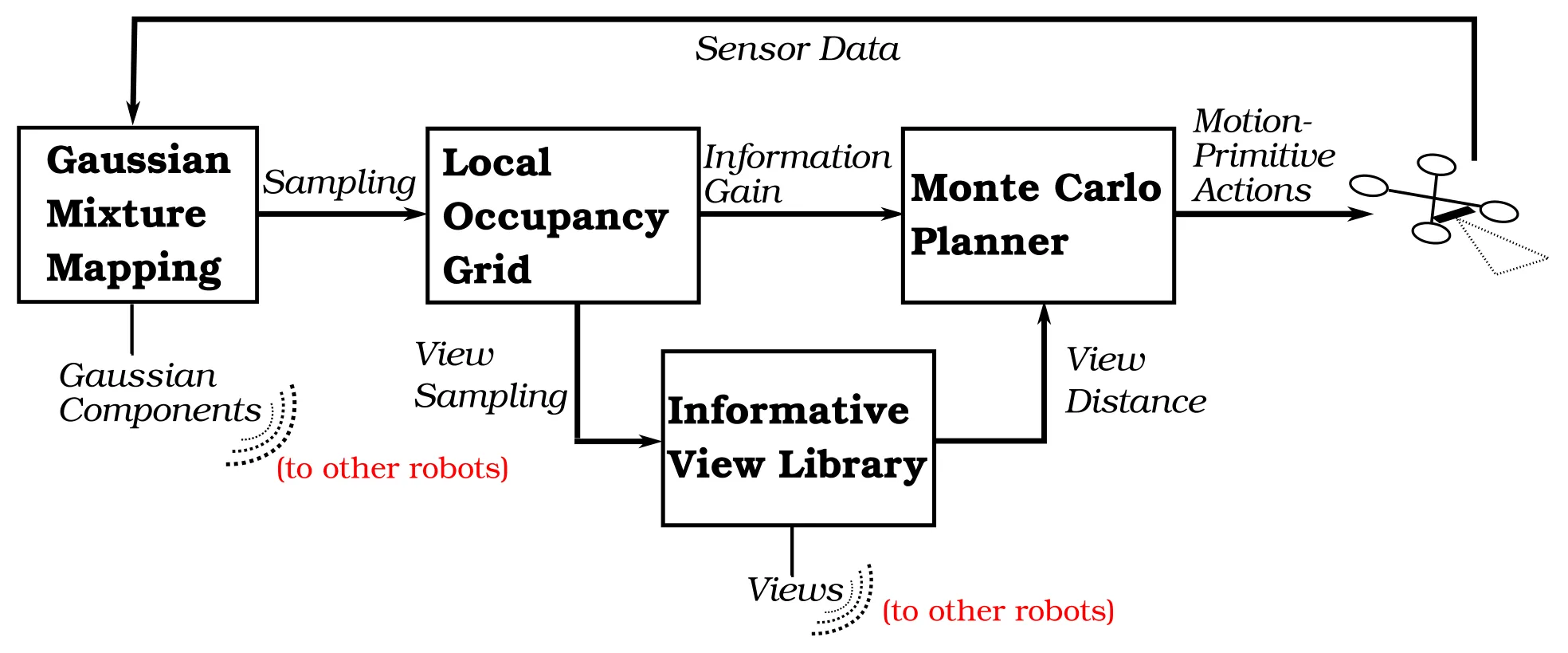
This paper addresses the following problem: How to efficiently communicate relevant information between robots as the robots explore a large 3D environment? To solve this, we propose: Use Gaussian Mixture Models (GMMs) and a sparse set of informative views to model and communicate local and global spread of occupancy information.
Figures
Acknowledgments
This work was supported in part by Department of Energy (DE-EM0004067), in part by Defense Threat Reduction Agency (HDTRA1-13-0026), and industry.
BibTeX
@article{communication-efficient-planning-2019,
title={Communication-Efficient Planning and Mapping for Multi-Robot Exploration in Large Environments},
author={Micah Corah, Cormac O'Meadhra, Kshitij Goel, and Nathan Michael},
journal={IEEE Robotics and Automation Letters, Apr. 2019},
year={2019}
}